In the future, machines will increasingly take over repetitive tasks to address the global labor shortage and give people the freedom they need.
Our F/T sensors give robots a sense of touch, enabling a new era of empathetic human-robot interaction while increasing performance, safety, and precision.
Agility meets Consistency

Resense is a joint venture between the measurement technology company WIKA Alexander Wiegand SE & Co. KG and the mechatronics group WITTENSTEIN SE. A young start-up backed by two German family-owned companies – that's what we are.
Resense benefits from professional structures, experienced colleagues and innovative technologies and production capacities on the part of the two shareholder companies. Together, the companies have been developing and manufacturing miniaturized force torque sensors at the WIKA site in Klingenberg, Germany, since the company was founded in April 2023 and are shaping the market for haptic sensors.
Press
medizin&technik, June 2025
Development & production together with WIKA
The article ‘Mini sensor for surgeons’ sensitivity in the operating room' not only explains how Resense's sensors could make operations even safer for patients and thus further drive the growth of surgical robotics, but also provides exciting insights into the joint development and production with their partner company WIKA.

June 2025
Delicate sensitivity for robots
'The haptic sensors in the HEX product family from Resense are ideal for equipping medical, service and industrial robots with an extremely precise sense of touch. The hollow shaft design also allows easy cable and conductor feed-through.' Read more in the articles:
MaschinenMarkt: Special issue 'Robotik & Automation, May 2025
F/T Sensor Kit
Our miniaturized 6-axis F/T sensors measure forces and torques in the three spatial directions (6 degrees of freedom).
In addition to the F/T sensor, our sensor kit includes an electronics box for evaluating the voltage signals and a software application for displaying and recording measured values on a PC.
Plug & Play – the setup is ready for use within a few minutes.
F/T Sensor
World's smallest 6-axis F/T sensor
- Small size (up to Ø 8 mm)
- Hollow shaft option
- Redundant measurement system (safety)
- Custom drill hole pattern
- Titanium deformation body
- Cable options (Flex cable with FPC connector or round cable)
Electronics Box

Sensor specific Electronics Box
- Embedded signal and filter options
- 1 kHz sample rate
- UART and USB interface
- Sensor matrix implemented
- 10 bit (true) precision
Application Software
Application Software F/T Sensor
- View real-time sensor data
- Record sensor readings
- Export and import measurings in multiple formats
We Enable Cutting-Edge Technology
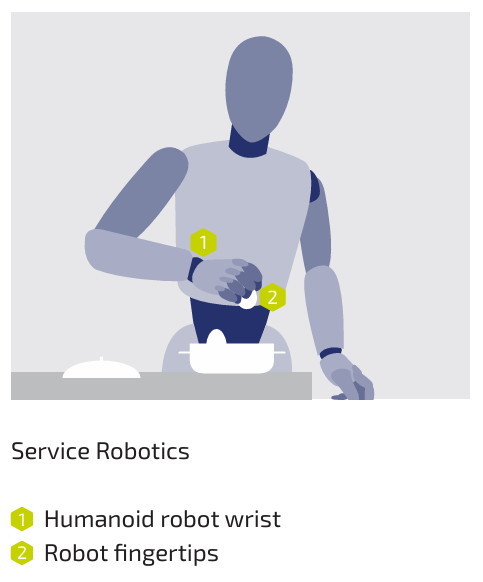
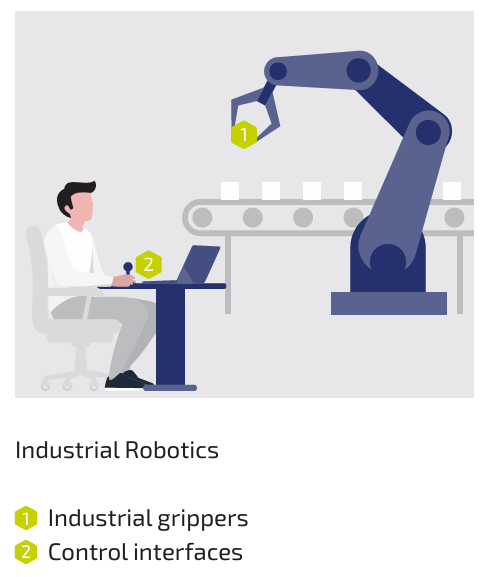
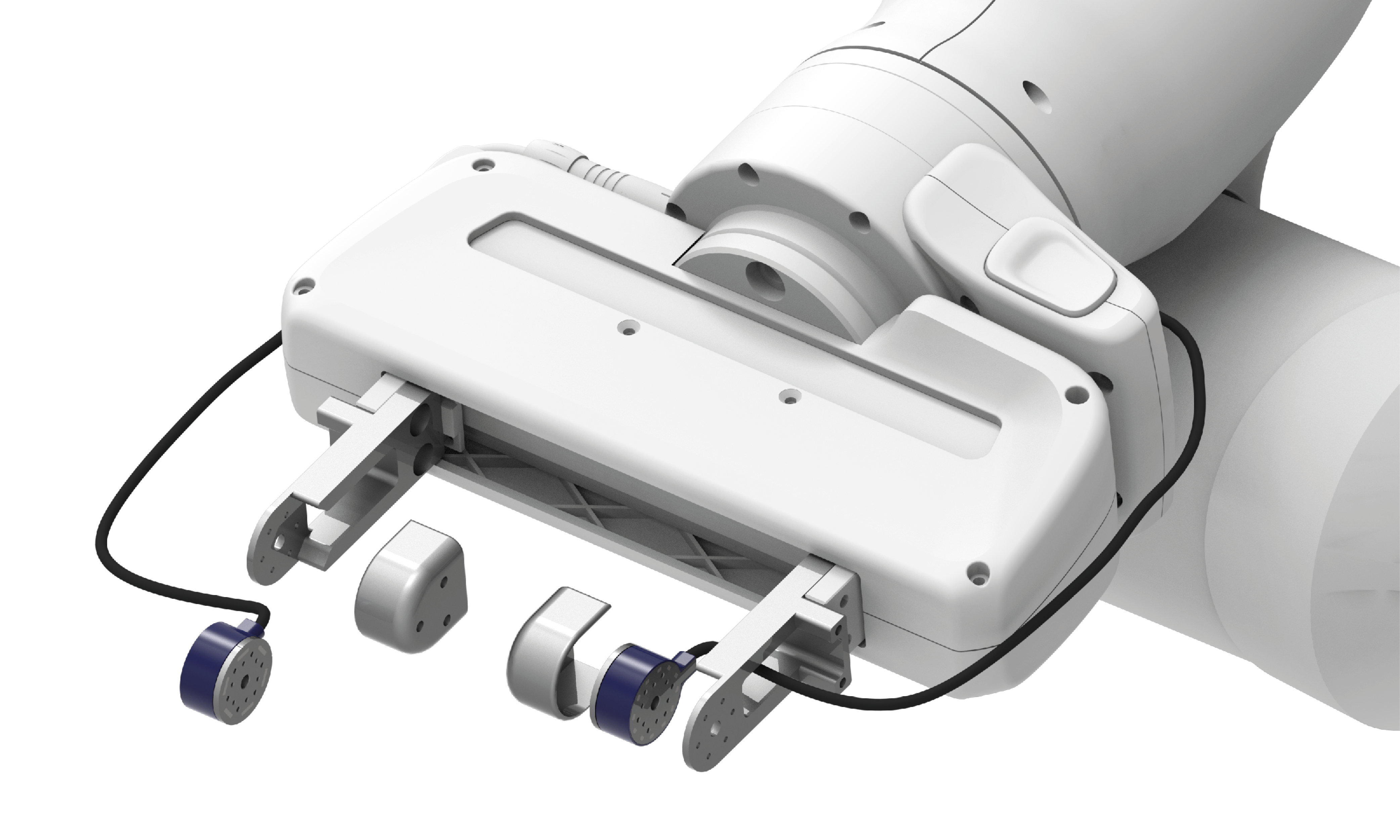
Thanks to their unique design and compact size, our force/torque sensors are used in a variety of areas such as medical, service and industrial robotics.
Above all, Resense sensors demonstrate their strengths when installed in end effectors of robotic systems for delicate manipulation and in haptic input devices for precise control, enabling the most innovative applications.
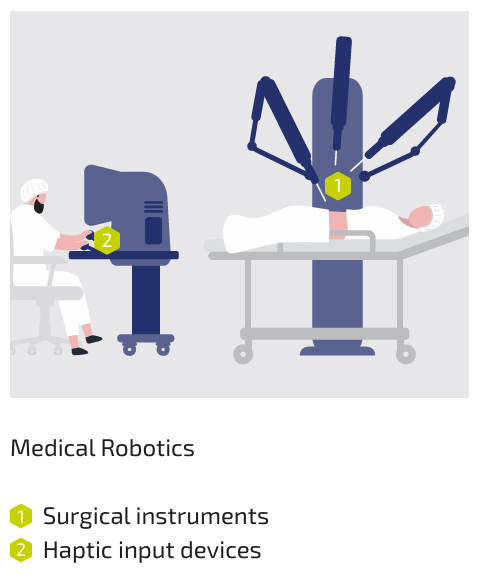
Haptic Feedback in Surgical Robotics
Resense force/torque sensors offer numerous advantages for robotic systems, surgeons and patients thanks to their small size, hollow shaft and the associated areas of application within surgical robotics.
The measurement of 6-axis data with maximum accuracy in and near the end effectors ensures the precise execution of operations and stronger safety mechanisms as well as haptic feedback for the surgeon.
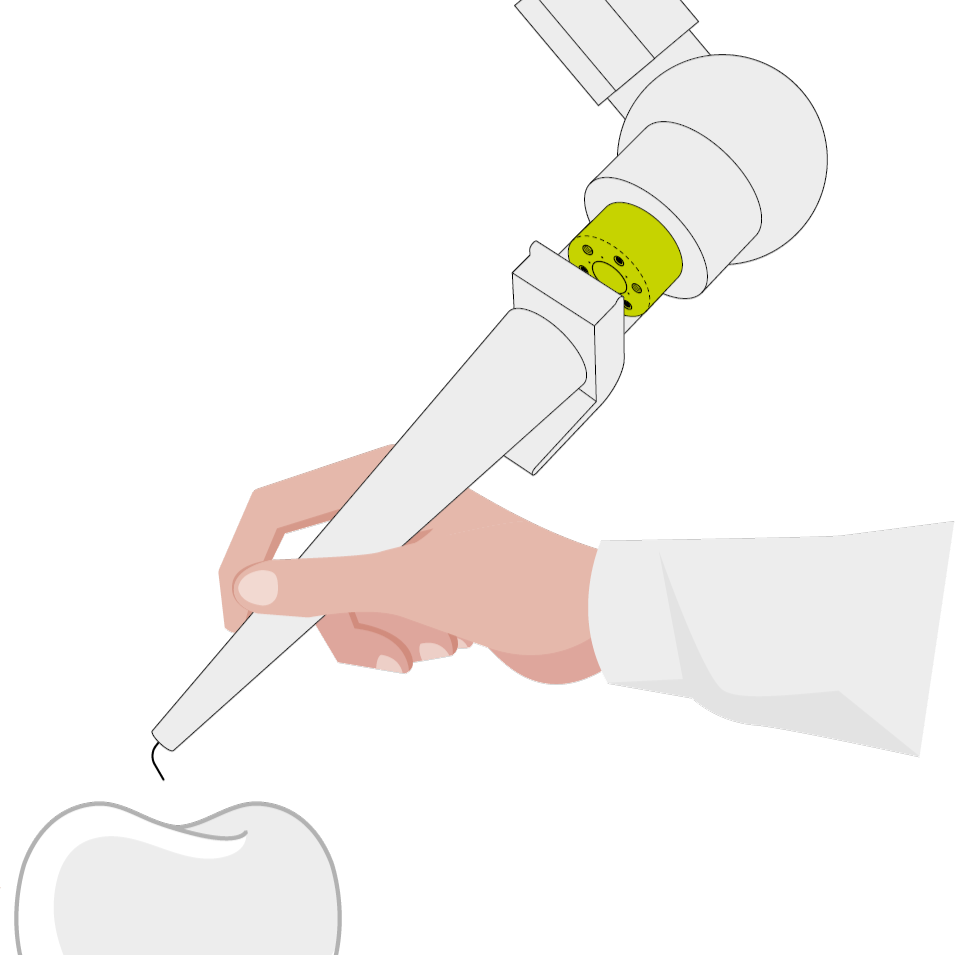
Robot-assisted dental surgery
- Adapter integration: HEX32 between tool and robot arm
- Hollow shaft: cables can be easily routed through the sensor to meet space requirements
- Hand-guided control: F/T data enables smooth guidance of the robot
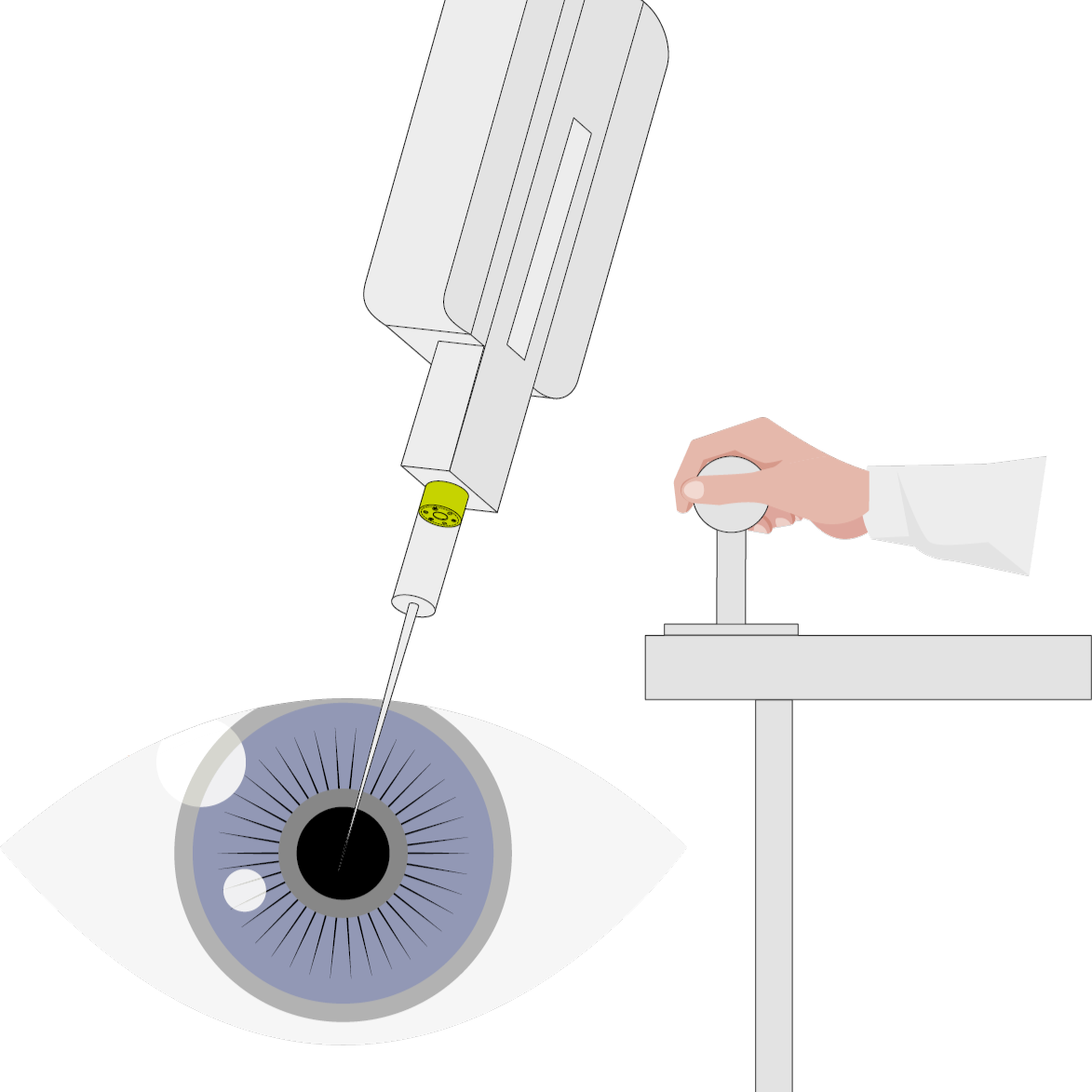
Robot-assisted eye surgery
- End effector integration: feed-through of tubes for liquid injection
- Precision measurement: detection of the smallest interaction forces within the eye
- Haptic feedback: Enabling force feedback on the input device
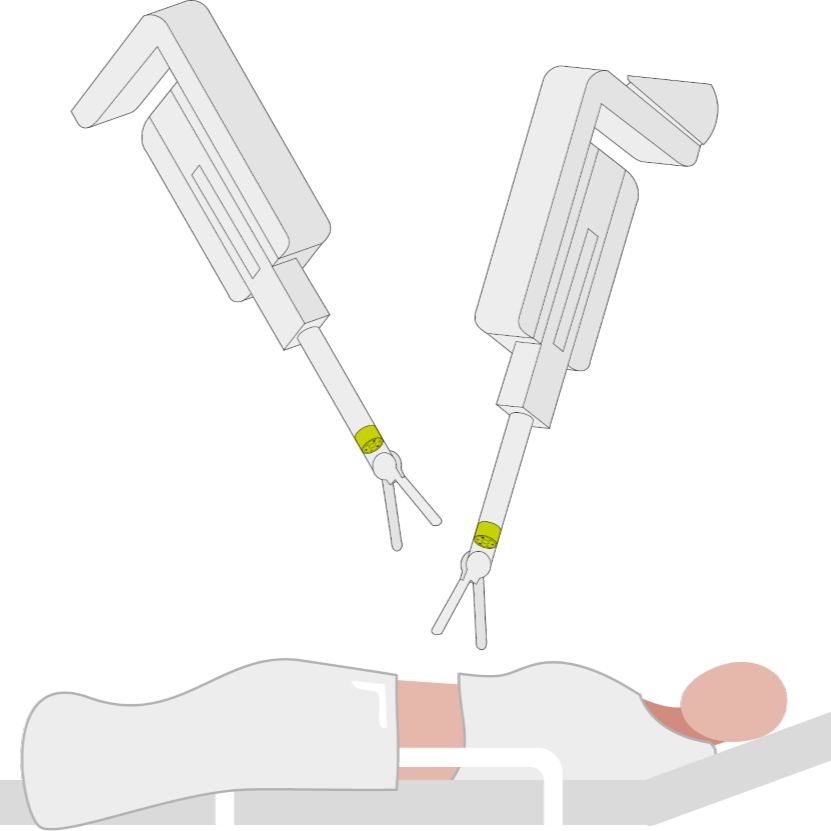
Abdominal surgery
- Instrument Integration: Diameter of 8.4 mm and custom screw hole pattern and hollow shaft for cables & rods
- Multi-Usage Instrument: Sterializability (under development)
- Force Feedback: Closing the feedback loop with mesaurement at the tooltip
Customer Applications

Robot-assisted surgery @ Klinikum rechts der Isar / TU Munich
The medical robotics project ForNeRo analyzes possibilities for the integration of robotic support in clinical workflows.
Application
Robotic system for eye surgery
Advantages of Resense sensors
- Force and torque measurement possible for the first time
- Increased accuracy and system safety
- Passing the tube through the hollow shaft to inject fluid into the human eye
Industrial Gripping @ KI.FABRIK Bayern
The KI.Fabrik is a lighthouse project of the Hightech-Agenda Bayern, which looks at the factory of the future, among other things with regard to human-robot interaction.
Application
Industrial robotics in intralogistics and assembly
Advantages of Resense sensors
- "Integration in gripper fingers thanks to small size: measurement at the point of action"
- Sensitive manipulation through interaction force measurement
- Increased safety (human-robot interaction)
Publications
| Title | Author | Industry Sector | Application Area | Set-Up | Use Case | Link | |
| 1 | Differential Six Axis Force and Torque Measurement in a Prototype Robotic Surgical Instrument | Neykov et al. (2025) | Medical Robotics | Minimal-invasive Surgery | Surgical Tool | Force Measurement within Instrument | Link |
| 2 | Velocity Modulation in Robotic Texture Exploration Based on Human Perceptual Dimensions | Li et al. (2025) | Service Robotics | Handling | Robotic End-Effector | Texture Recognition | Link |
| 3 | Learning Force Distribution Estimation for the GelSight Mini Optical Tactile Sensor Based on Finite Element Analysis | Helmut et al. (2025) | Measurement Technology | Manipulation | Force Measuring Device | Reference Measurement | Link |
| 4 | WaveTouch: Active Tactile Sensing Using Vibro-Feedback for Classification of Variable Stiffness and Infill Density Objects | Sandykbayeva et al. (2025) | Industrial Robotics | Handling | 2-jaw Parallel Gripper | Force Control | Link |
| 5 | Scene Understanding Through Visual and Haptic Perception | Pavlic et al. (2025) | Industrial Robotics | Manufacturing | 2-jaw Parallel Gripper | Learning from Demonstration | Link |
| 6 | NUSense: Robust Soft Optical Tactile Sensor | Mukashev et al. (2025) | Service Robotics | Handling | Reference Measurement | Object Property Recognition | Link |
| 7 | Honeycomb-Inspired Metamaterial for Tactile Sensors With Variable Stiffness | Chibar et al. (2025) | Service Robotics | Handling | Reference Measurement | Interaction Force Measurement | Link |
| 8 | Force-based Haptic Input Device and Online Motion Generator: Investigating Learning Curves in Robotic Telemanipulation | Markert et al. (2024) | Industrial Robotics | Handling | Haptic Input Device (Joystick) | Telemanipulation | Link |
| 9 | E-BTS: Event-Based Tactile Sensor for Haptic Teleoperation in Augmented Reality | Mukashev et al. (2024) | Industrial Robotics | Handling | Robotic End-Effector | Manipulation | Link |
| 10 | Robotic Peg-in-Hole Insertion with Tight Clearances: A Force-based Deep Q-Learning Approach | Markert et al. (2023) | Industrial Robotics | Manufacturing | 2-jaw Parallel Gripper | Peg-in-Hole Insertion | Link |
| 11 | HASHI: Highly Adaptable Seafood Handling Instrument for Manipulation in Industrial Setting | Allison et al. (2023) | Industrial Robotics | Food Handling | Instrument Adapter | Soft Object Manipulation | Link |
| 12 | RobotScale: A Framework for Adaptable Estimation of Static and Dynamic Object Properties with Object-dependent Sensitivity Tuning | Pavlic et al. (2023) | Industrial Robotics | Intralogistics | 2-jaw Parallel Gripper | Object Property Estimation | Link |
| 13 | Comparing Human Haptic Perception and Robotic Force/Torque Sensing in a Simulated Surgical Palpation Task | Markert et al. (2022) | Medical Robotics | Medical Diagnosis | Palpation Instrument | Surgical Palpation | Link |
| 14 | Measuring Interaction Forces in Surgical Telemanipulation using Conventional Instruments | Schäfer et al. (2022) | Medical Robotics | Minimally Invasive Surgery | Instrument Adapter | Interaction Force Measurement | Link |
| 15 | Hand-Held Device for Force Estimation during Tool-Tissue Interaction | Mayer et al. (2022) | Medical Robotics | Needle Insertion | Hand-Held Device | Force Estimation | Link |
| 16 | VibroTouch: Active Tactile Sensor for Contact Detection and Force Sensing via Vibrations | Sandykbayeva et al. (2022) | Industrial Robotics | Contact Detection | 2-jaw Parallel Gripper | Vibration Analysis | Link |
| 17 | Fingertip 6-Axis Force/Torque Sensing for Texture Recognition in Robotic Manipulation | Markert et al. (2021) | Service Robotics | Household | 2-jaw Parallel Gripper | Texture Recognition | Link |
References

Technical data
| HEX 8 | |||||||
| Data sheet | |||||||
Dimension | |||||||
| Diameter a) | 8.4 mm | 10.0 mm | 12.5 mm | 21.0 mm | 32.0 mm | ||
| Height | 10.9 mm | 10.9 mm | 10.9 mm | 10.9 mm | 11.1 mm | ||
Weight | 1.4 g | 2.0 g | 3.3 g | 9.9 g | 50.0 g | ||
| Nominal measurement range | |||||||
Fx, Fy, Fz | ± 25 N | ± 25 N | ± 25 N | ± 50 N | ± 125 N | ||
Mx, My, Mz | ± 0.100 Nm | ± 0.125 Nm | ± 0.125 Nm | ± 0.500 Nm | ± 2.250 Nm | ||
Technical specifications | |||||||
| Resolution | ± 10 bit (true), 3 σ | ||||||
| Accuracy b) | 1% | ||||||
| Crosstalk | 3% | ||||||
| Overload capacity | 300% | ||||||
| Product features | |||||||
Material | Titanium grade 5 | ||||||
Protection class | IP20 | ||||||
| Temperature range | 0 – 50 °C | ||||||
| Technology | Silicon | Foil strain gauges | |||||
| Cable | Flex cable with axial/radial cable outlet | Round cable with radial cable outlet and Sub-D-HD connector | |||||
a) The diameter excludes any connector or cable features. b) The accuracy is the difference between the applied and the actually measured load. | |||||||
Product feature | |||
| Dimensions | 54 x 25 x 12.6 mm | ||
Supply voltage | 5 V | ||
| Interfaces | USB, UART | ||
| Sample rate | 100 Hz, 500 Hz, 1 kHz | ||
Resolution (ADC) | 24 bit | ||
| Temperature range | 0 °C – 50 °C |
Downloads
Contact us
Is there anything you'd like to know about our F/T sensors? Do you require personal advice?
If so, please contact us directly. We look forward to hearing from you!
Your contact

Our Team

Timo Markert
Managing Director

Dr. Sebastian Matich
Technical Director

Christina Geiss
Corporate Development
Sabrina Hock
Business Development

Viola Brehm
Team Assistance

Anna-Theresia Stahl
Marketing

Ernst Schermann
Engineering

Jerome Sahaya
Engineering

Antoine Dilly
Enigneering

Carina Schuessler
Engineering

Sabina Radulova
Engineering

Marvin Heins
Engineering

Moritz Floerchinger
Manufacturing

Luisa Wellein
Manufacturing

Johannes Aigner
Manufacturing

David Schröder
Engineering

Samruddhi Daryapurkar
Engineering
Sibel Özcan
Manufacturing

Job vacancies
Would you like to shape the future of Resense with us? Apply to our vacancies or send an unsolicited application to your desired position in the startup.