今後、世界的な労働力不足に対処し、人々に必要な自由を与えるために、機械は反復的な仕事をますます代行するようになるでしょう。
当社のF/Tセンサは、ロボットに触覚を与え、パフォーマンス、安全性、精度を向上させながら、人間とロボットの共感的なインタラクションの新時代を可能にします。
敏捷性と一貫性の融合

Resenseは、計測技術会社 WIKA Alexander Wiegand SE & Co. KG とメカトロニクス・グループの WITTENSTEIN SE. とのジョイント・ベンチャーです。当社は、ドイツの同族会社2社に支えられた若いスタートアップ企業です。
Resenseは、株主である2社の専門的な組織、経験豊富な同僚、革新的な技術と生産能力から恩恵を得ています。同社は、2023年4月の設立以来、ドイツのクリンゲンベルクにあるWIKAの拠点で小型力覚センサの開発と製造を行っており、触覚センサ市場を形成しています。
F/Tセンサーキット
当社の小型6軸F/Tセンサは、3方向の力とトルクを測定します。(6DoF)
F/Tセンサに加えて、当社のセンサキットには、電圧信号を評価するためのエレクトロニクスボックスと、PC上で測定値を表示・記録するためのアプリケーションソフトウェアが含まれています。
Plug & Play – 数分でセットアップが完了します。
F/Tセンサ
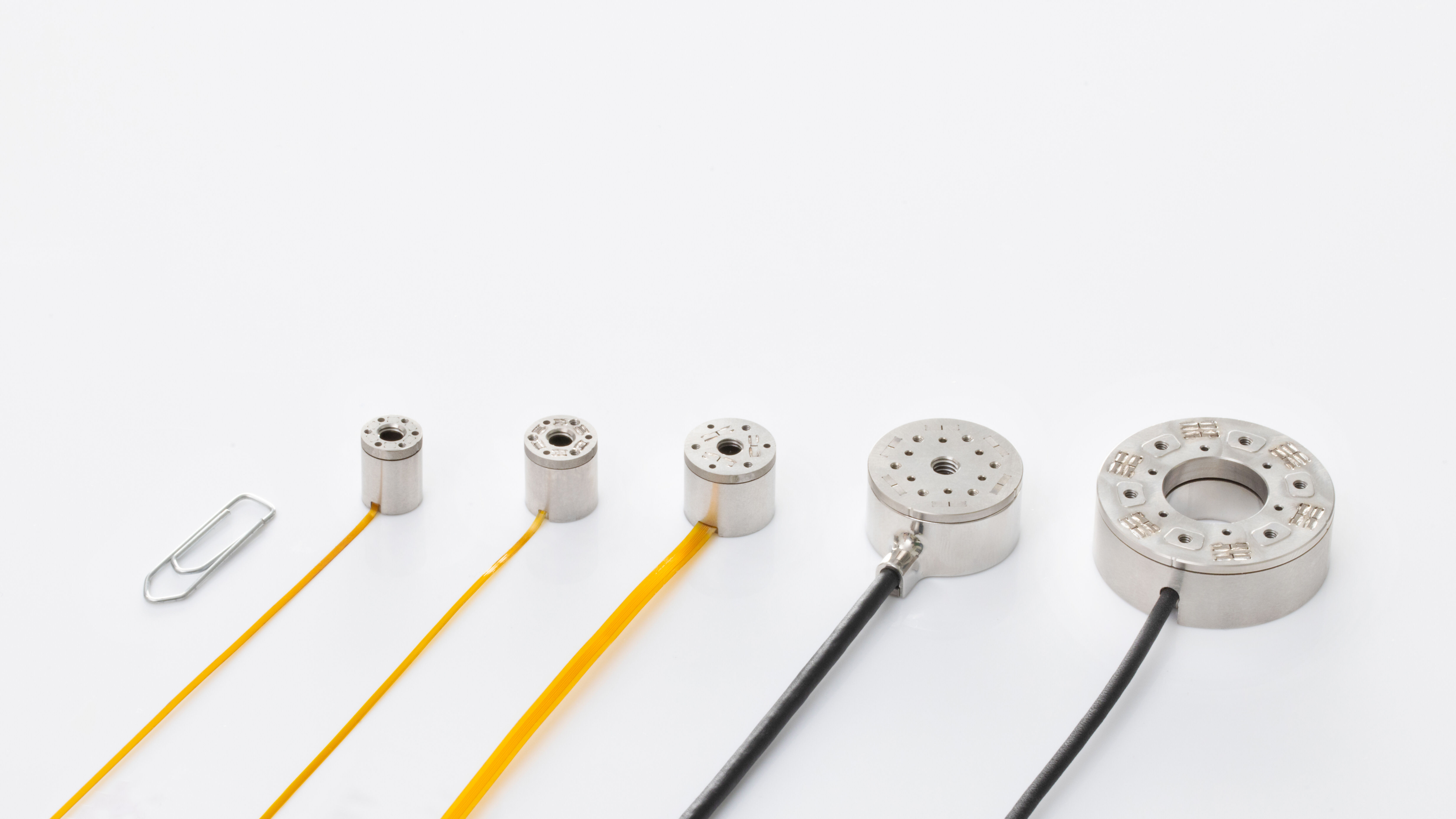
世界最小の6軸F/Tセンサ
- 小型サイズ(最大Ø 8 mm)
- 中空軸オプション
- 冗長測定システム(安全性)
- カスタマイズ穴パターン
- チタン変形ボディ
- ケーブルオプション(FPCコネクタ付きフレキシブル導体アウトレットまたは丸型ケーブル)
エレクトロニクスボックス

センサ固有の評価エレクトロニクス
- 統合信号処理およびフィルタオプション
- サンプリングレート1 kHz
- UARTおよびUSBインターフェース
- 校正マトリックス実装
- 精度10ビット(真)
アプリケーション・ソフトウェア
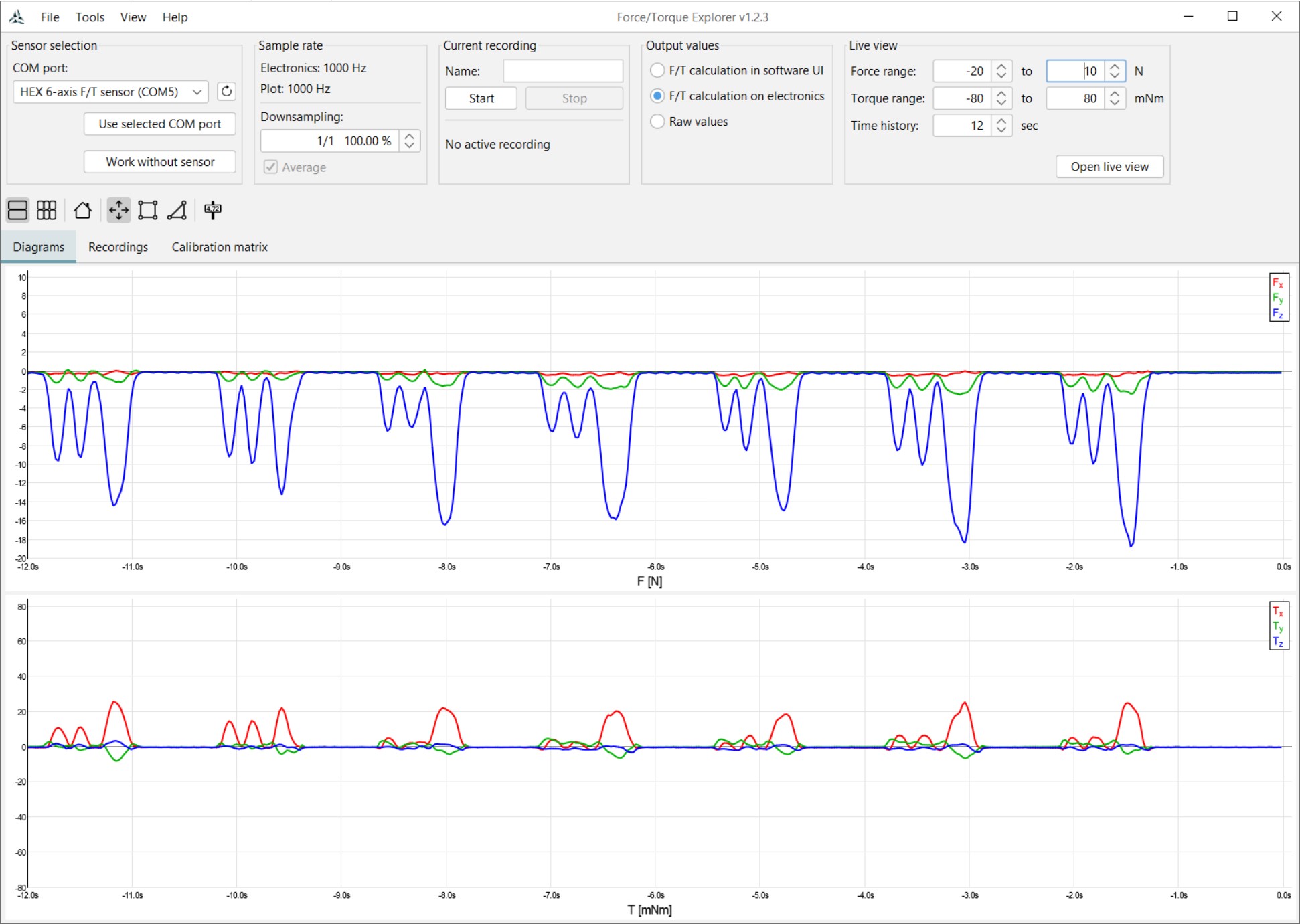
アプリケーションソフトウェア F/T センサ
- センサデータをリアルタイムで表示
- 記録機能
- 異なるフォーマットでの測定値のインポートおよびエクスポート
最先端技術を可能にする
当社の力覚センサは、そのユニークなデザインとコンパクトなサイズにより、医療、サービス、産業用ロボットなど様々な分野で使用されています。
特に、Resenseのセンサは、繊細な操作を行うロボットシステムのエンドエフェクタや、精密な制御を行う触覚入力装置に搭載されることでその強みを発揮し、最も革新的なアプリケーションを可能にします。
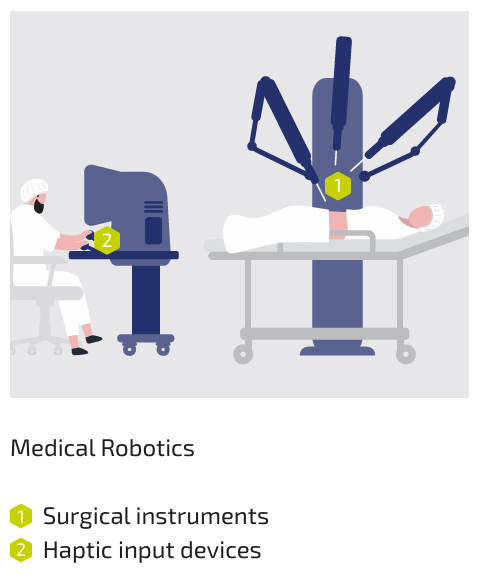
手術支援ロボットにおける触覚フィードバック
Resense力覚センサーは、小型・軽量なサイズと中空軸を備えた構造が大きな特長です。手術支援ロボット用途に適し、ロボットシステム、外科医、そして患者様に多くのメリットをもたらします。
エンドエフェクタおよびその周辺で高精度な6軸データを測定することで、正確な操作の実現に加え、強力な安全機構の構築や、外科医への触覚フィードバックの提供を可能にします。
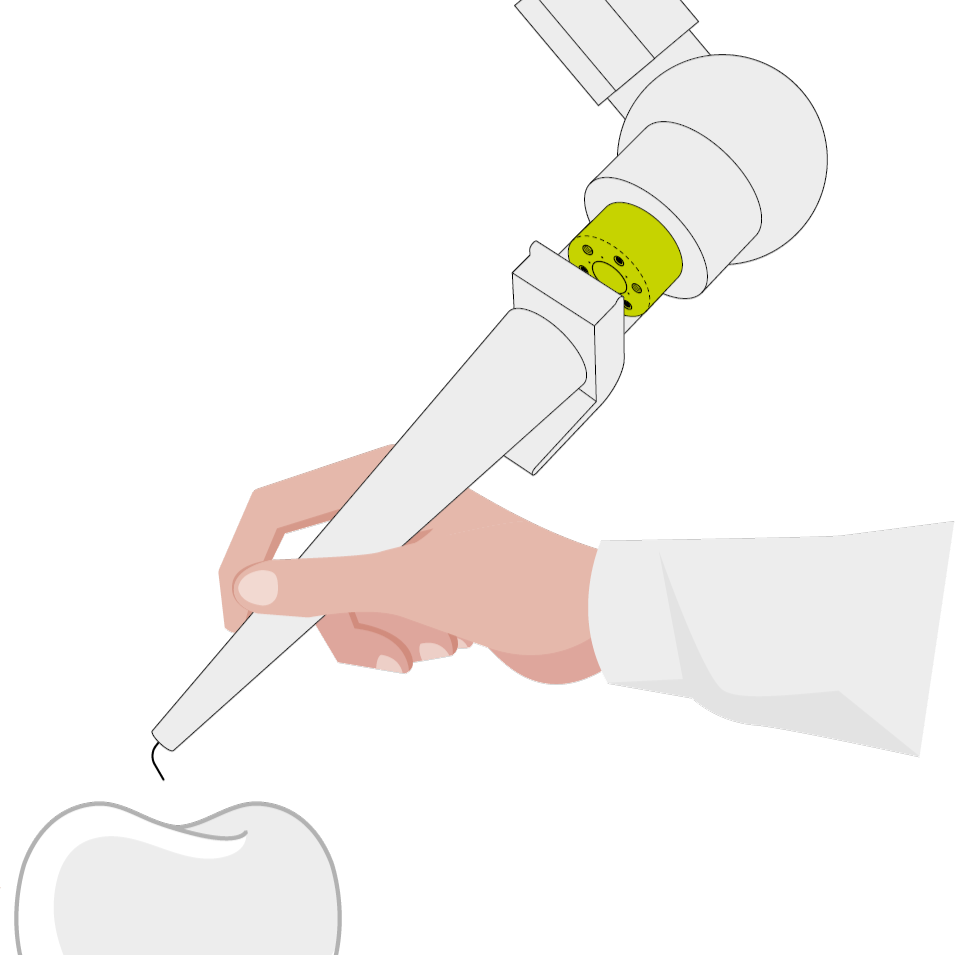
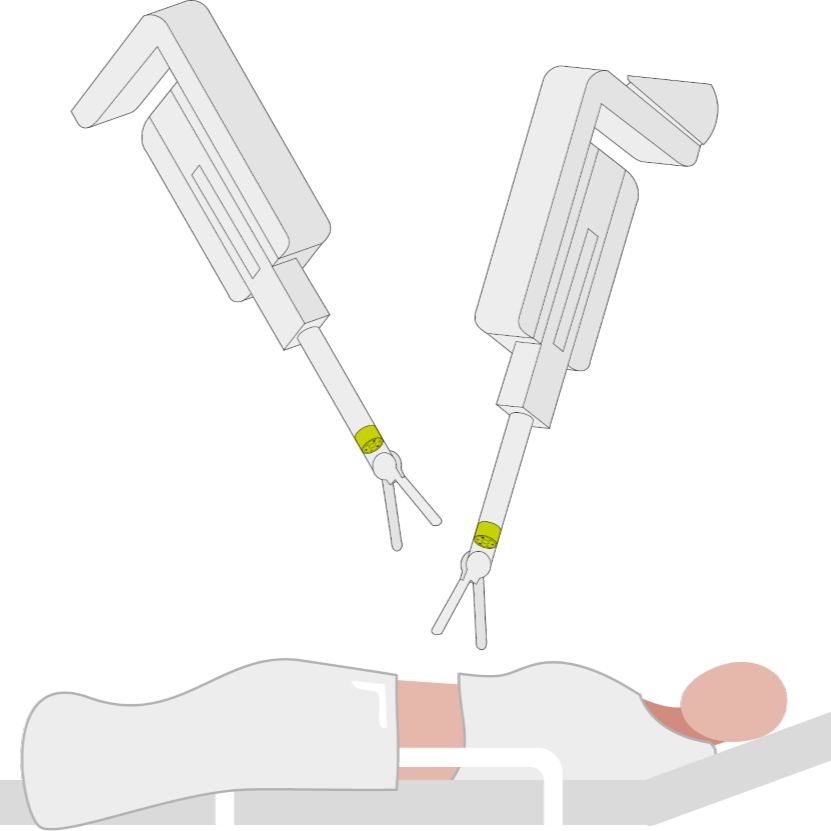
手術支援ロボットを使った歯科手術
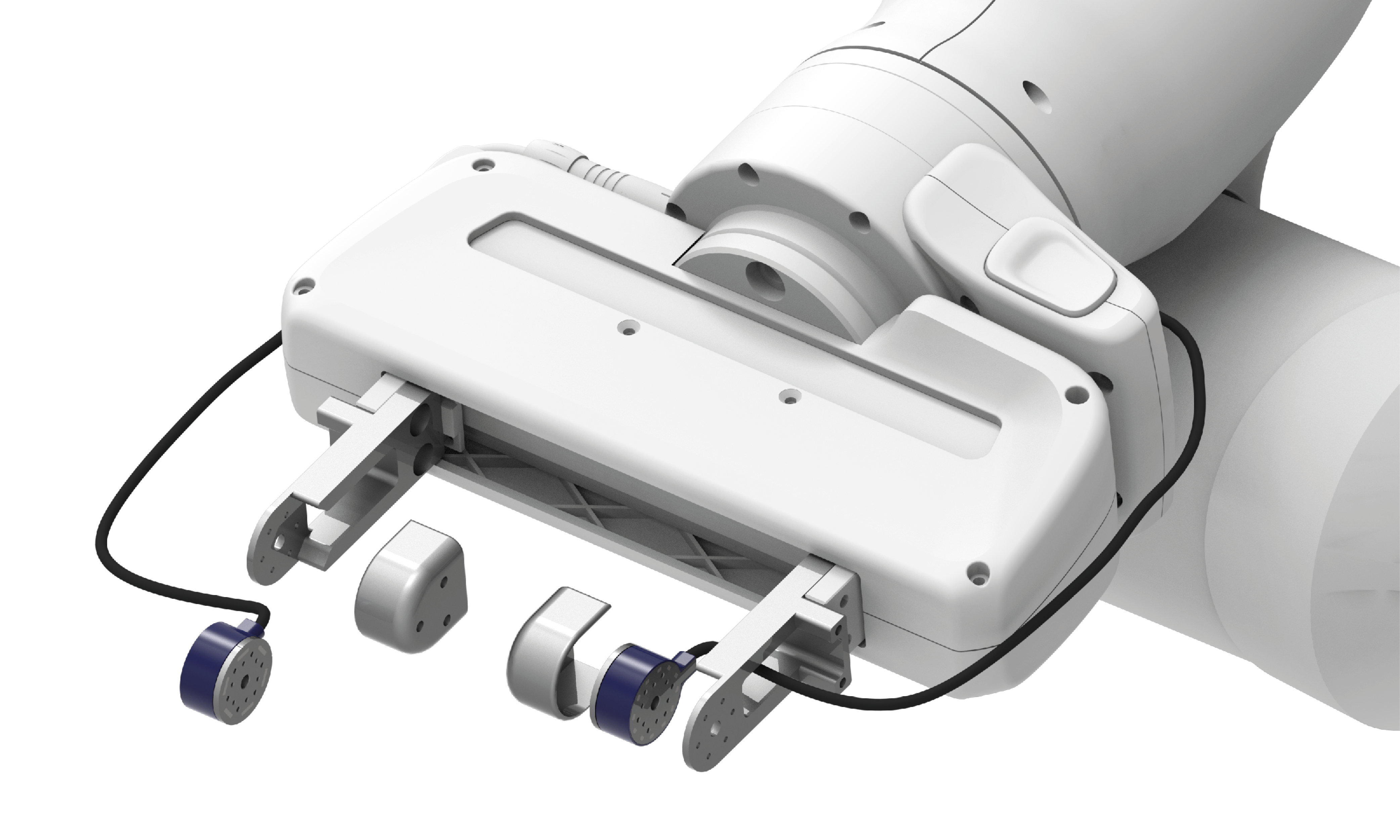
- アダプターとの統合:ツールとロボットアームの間にHEX32を取り付けることが可能
- 中空軸:ケーブルを容易に通すことができ、省スペース設計に対応
- ハンドガイド機能: 力覚センサーが取得したデータによりロボットをスムーズに誘導
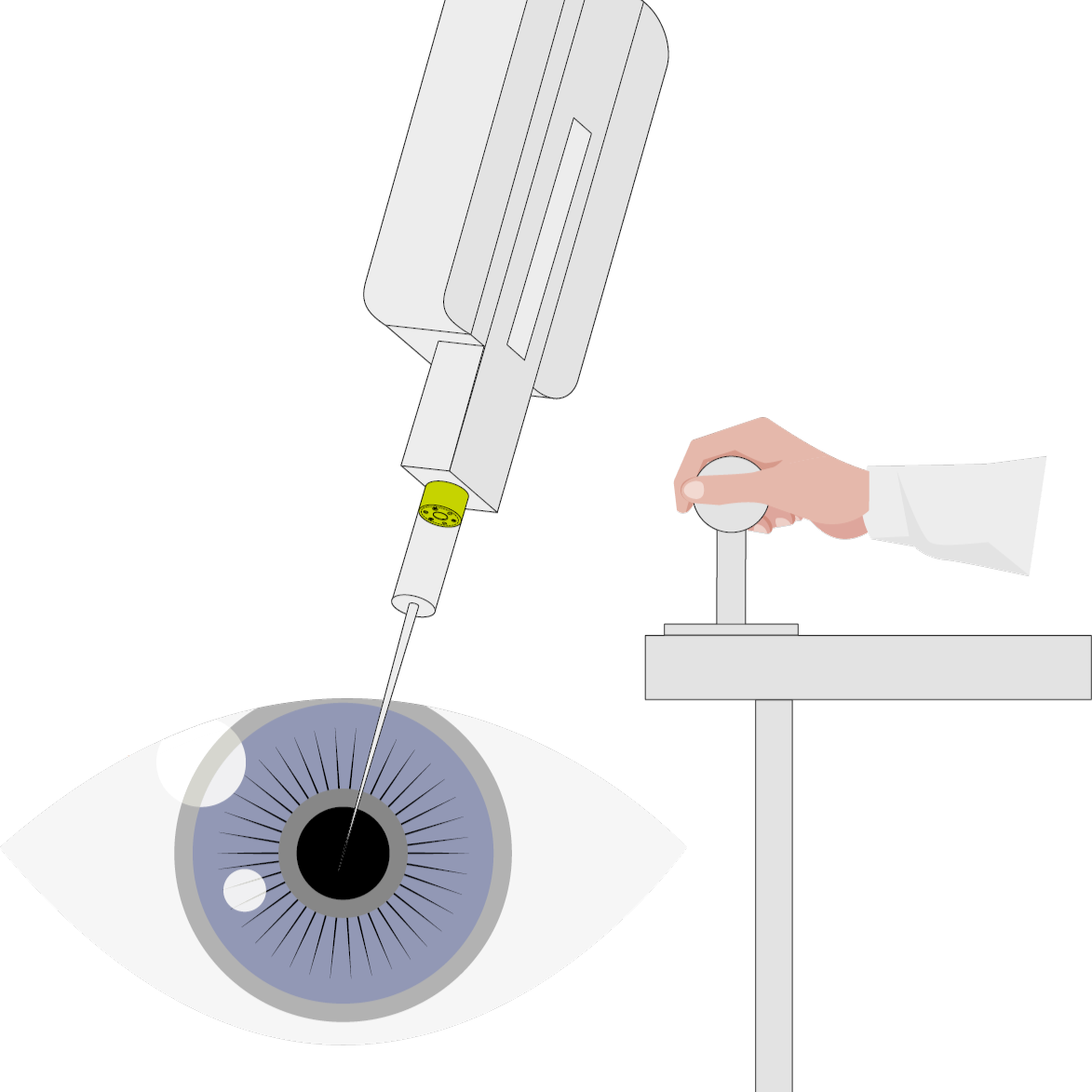
手術支援ロボットを使った眼科手術
- エンドエフェクタとの統合:液体注入用チューブを通すことが可能
- 精密測定:眼内で受ける極めて小さな力の検出
- 触覚フィードバック: 入力デバイスへのフォースフィードバックを可能にします
腹部手術
- 器具へのスムーズな統合: 直径8mmの小型設計。ケーブルやロッドを通せるカスタム仕様の中空軸
- 再使用可能な器具への組み込み: 滅菌対応(現在開発中)
- フォースフィードバック:ツール先端での測定によりフィードバックを閉ループ化
お客様のアプリケーション

ロボット支援手術@ Klinikum rechts der Isar / TU München
ロボット支援手術 @ Klinikum rechts der Isar / ミュンヘン工科大学
医療ロボットプロジェクトForNeRoは、臨床ワークフローにロボット支援を統合する方法を分析しています。
アプリケーション
眼科手術用ロボットシステム
Resenseセンサの利点
- 力とトルクの測定が初めて可能に
- 精度とシステムの安全性が向上
- 中空軸にチューブを通し、眼球に液体を注入
工業用グリップ @ KI.FABRIK Bayern
工業用グリップ @ KI.FABRIKバイエルン
KI.FABRIKはバイエルン州の「ハイテク・アジェンダ」のLighthouseプロジェクトで、未来の工場、特に人間とロボットの相互作用に注目しています。
アプリケーション
イントラロジスティクスおよび組立分野における産業用ロボット工学
Resenseセンサの利点
- 「小型化によるグリッパーフィンガーへの統合:動作点での計測」
- 相互作用力測定による繊細な操作
- 安全性の向上(人間とロボットの相互作用)
出版物
| タイトル | 著者 | 業種 | 適用分野 | セットアップ | 使用例 | リンク | |
| 1 | WaveTouch:振動フィードバックを用いた能動触覚センシングによる可変剛性および充填密度物体の分類 | Sandykbayeva ら (2025) | 産業用ロボット | ハンドリング | 2爪平行グリッパー | 力制御 | リンク |
| 2 | 視覚および触覚知覚に基づくロボットのシーン理解 | Pavlic ら (2025) | 産業用ロボット | 製造 | 2爪平行グリッパー | 模倣学習 | リンク |
| 3 | 力覚ベースの触覚入力装置とオンライン動作生成器:ロボット遠隔操作における学習曲線の調査 | Markert ら (2024) | 産業用ロボット | 取り扱い | 触覚入力デバイス (ジョイスティック) | 遠隔操作 | リンク |
| 4 | 狭小クリアランス条件でのロボットによるピン挿入作業:Deep Q-Learningを用いた力制御 | Markert ら (2023) | 産業用ロボット | 製造 | 2爪平行グリッパー | ピン挿入作業 | リンク |
| 5 | HASHI:産業現場での操作に対応した適応性の高い水産物ハンドリング装置 | Allison ら (2023) | 産業用ロボット | 食品のハンドリング | 器具用アダプター | 柔らかい物体のハンドリング | リンク |
| 6 | RobotScale:物体特性に応じた感度調整による静的・動的特性の推定フレームワーク | Pavlic ら (2023) | 産業用ロボット | イントラロジスティクス | 2爪平行グリッパー | 物体の性質推定 | リンク |
| 7 | 模擬手術における触診タスクでの人間の触覚知覚とロボットの力・トルクセンシングの比較 | Markert ら (2023) | 医療用ロボット | 医療診断 | 触診用器具 | 手術中の触診 | リンク |
| 8 | 遠隔操作手術における従来型手術器具を用いた相互作用力の推定 | Schäfer ら (2022) | 医療用ロボット | 最小侵襲手術 | 器具用アダプター | 相互作用力の測定 | リンク |
| 9 | 手術器具と生体組織の接触における力推定のための携帯型デバイス | Markert ら (2023) | 医療用ロボット | 針の挿入 | 携帯型デバイス | 力の推定 | リンク |
| 10 | VibroTouch:振動を利用した接触検出および力検知のための能動型触覚センサー | Sandykbayeva ら (2022) | 産業用ロボット | 接触検知 | 2爪平行グリッパー | 振動解析 | リンク |
| 11 | ロボットの指先における6軸力・トルクセンシングを用いたテクスチャ認識 | Markert ら (2023) | サービスロボット | 家庭用 | 2爪平行グリッパー | テクスチャ認識 | リンク |
参考文献

技術データ
| HEX 8 | |||||||
| データシート | |||||||
寸法 | |||||||
| 直径 a) | 8.4 mm | 10.0 mm | 12.5 mm | 21.0 mm | 32.0 mm | ||
| 高さ | 10.9 mm | 10.9 mm | 10.9 mm | 10.9 mm | 11.1 mm | ||
重量 | 1.4 g | 2.0 g | 3.3 g | 9.9 g | 50.0 g | ||
| 基準寸法範囲 | |||||||
Fx, Fy, Fz | ± 25 N | ± 25 N | ± 25 N | ± 50 N | ± 125 N | ||
Mx, My, Mz | ± 100 mNm | ± 125 mNm | ± 125 mNm | ± 500 mNm | ± 2.25 Nm | ||
技術仕様 | |||||||
| 分解能 | ± 10 bit (true), 3 σ | ||||||
| 精度 b) | 1% | ||||||
| クロストーク | 3% | ||||||
| 過負荷性能 | 300% | ||||||
| 製品特長 | |||||||
材質 | グレード 5 チタン、アルミニウム | ||||||
保護等級 | IP20 | ||||||
| 温度範囲 | 0~50 °C | ||||||
| 技術 | シリコーン | ひずみゲージ | |||||
| ケーブル | アキシャル/ラジアル接続のフレキシブルケーブル | ラジアル接続の丸形ケーブル および Sub-D-HD コネクタ | |||||
a) 上記の直径には、コネクタ部分やケーブル部分は含まれません。 b) 精度は、運用負荷と実際に測定された負荷との差を指します。 | |||||||
製品特長 | |||
| 寸法 | 54 x 25 x 12.6 mm | ||
供給電圧 | 5 V | ||
| インターフェース | USB、UART | ||
| サンプルレート | 100 Hz、500 Hz、1 kHz | ||
分解能 (アナログデジタル変換器) | 24 bit | ||
| 温度範囲 | 0 °C~50 °C |
Downloads
お問い合わせ
フォーストルクセンサについて、何かお知りになりたいことはございませんか。個別のご相談がご入り用でしたら、
直接当社までお問い合わせください。ご連絡をお待ちしております。
担当者

チーム

Timo Markert
Managing Director

Dr. Sebastian Matich
Technical Director

Christina Geiss
Business Development

Sabrina Hock
Business Development

Viola Brehm
Team Assistance

Anna-Theresia Stahl
Marketing

Ernst Schermann
Engineering

Jerome Sahaya
Engineering

Antoine Dilly
Engineering

Carina Schuessler
Engineering

Sabina Radulova
Engineering

Marvin Heins
Engineering

Moritz Flörchinger
Manufacturing

Luisa Wellein
Manufacturing

Johannes Aigner
Manufacturing

David Schröder
Engineering

Samruddhi Daryapurkar
Engineering
Sibel Özcan
Manufacturing