Medical Robotics
Delivering Precise Control and Force Feedback
Force feedback and smooth, ergonomic control are no longer out of reach. With our miniature, high-precision, and modular design, Resense’s force and torque sensors enable entirely new applications.
Sensing along the System

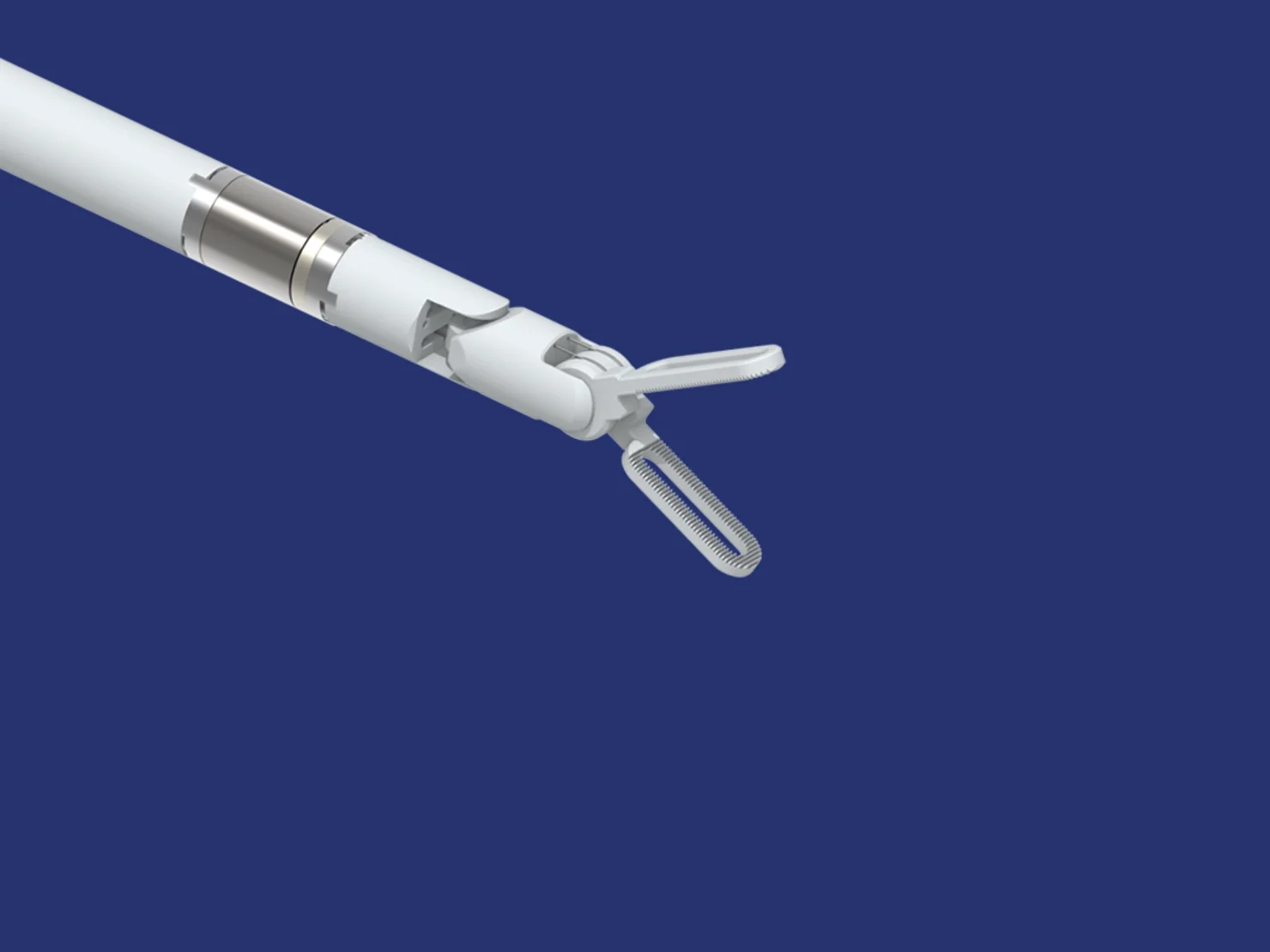
Integration at the distal ends of reusable, minimally invasive instruments enable haptic feedback for the surgeon, supporting precise instrument control and reducing the risk of tissue trauma.

Integration into surgical end‑effectors, allows surgeons to feel tool–tissue interaction, enhance surgical safety by enabling real‑time warnings, and achieve more precise, intuitive robotic control.

Through placing the sensor between the robotic arm and the instrument external forces can be detected and smooth hand-guided operation can be supported, ultimately enhancing the patient's safety.

Integrating force and torque sensors into input devices enables the detection of very small forces and translates them into precise robotic movements, improving overall human‑robot interaction.

Integrating F/T sensors into the head console enables smooth system adjustments by interpreting subtle user inputs and generating fluid movements. This supports ergonomic seating positions for surgeons.

Integrating sensors into motor drives eliminates sterilization challenges and enhances force feedback and operational safety.
Shaft-Integrated Force Sensing
Success Story Achieving a force estimation error below 5%, our approach demonstrates strong performance compared to established methods by combining 6-axis F/T sensing with advanced force estimation.
In collaboration with Case Western Reserve University, we integrated our miniature 6-axis force/torque sensor directly into a surgical instrument. Embedded in the tool shaft, it enables precise measurement of tool–tissue interaction forces without affecting the surgical workflow.
The sensor is so small, we didn't even know that was possible!
